[h=2]مقدمه[/h]


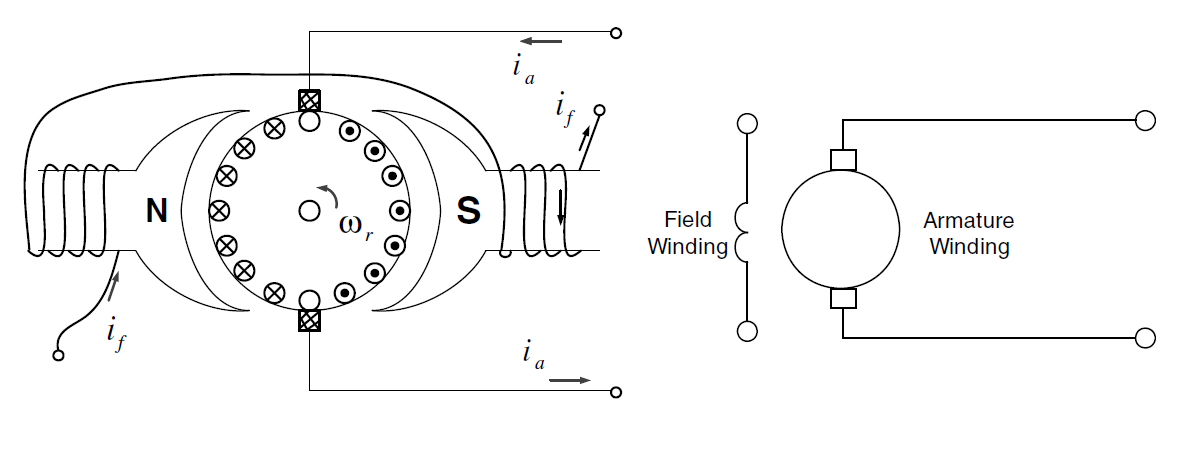
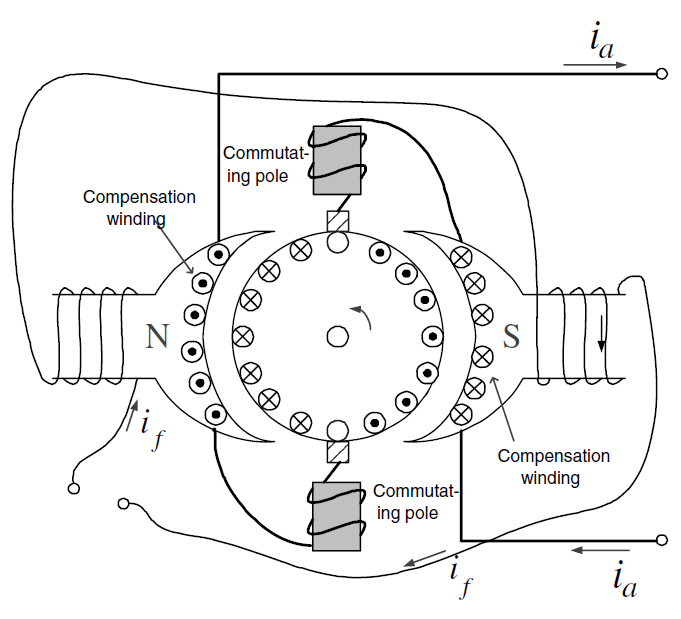
یک موتور DC و اجزای آن
موتورهای DC مشابه ژنراتورهای DC هستند با این تفاوت که جهت توان و درنتیجه جهت جریان آرمیچر در آن عوض شده است. درنتیجه یک ماشین هم می تواند به صورت موتور و هم به صورت ژنراتور به کار رود. اینکه واقعا به کدام صورت کار می کند تنها به جهت عبور توان در آن بستگی دارد.
ماشین DC وقتی که به عنوان مولد کار می کند ، توسط یک ماشین مکانیکی می چرخد و ولتاژی ایجاد می کند که باعث ایجاد جریان در یک مدار الکتریکی می گردد. حال وقتی که به عنوان موتور کار می کند ، توسط یک منبع ولتاژ تغذیه می شود که باعث ایجاد گردش مکانیکی می گردد.
به رغم اینکه سالیان سال است که از سیستم های قدرت AC استفاده می شود و دیگر سیستم های DC جایگاهی ندارند ، هنوز هم موتورهای DC رایج هستند. با این وجود سوال این است که چرا موتورهای DC اینقدر رایج اند ، حال آنکه سیستم های قدرت DC بسیار نادرند؟
رواج موتورهای DC چند علت دارد. یکی اینکه هنوز هم سیستم های توان DC در اتومبیل ها، کامیون ها و هواپیماها به کار می رود. مادامی که این وسایل با منبع توان DC کاربرد دارند بدیهی است که باید از موتور DC استفاده کرد. دلیل دیگر رواج موتورهای DC این است که محدوده ی تغییرات سرعت آن وسیع بوده و لذا کنترل دور خوبی دارد.
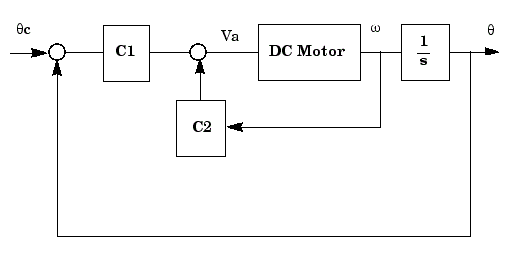
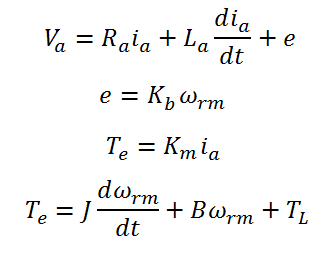
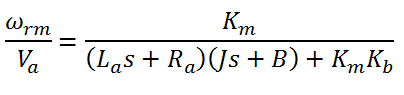
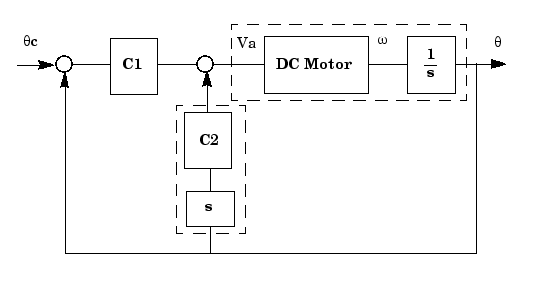
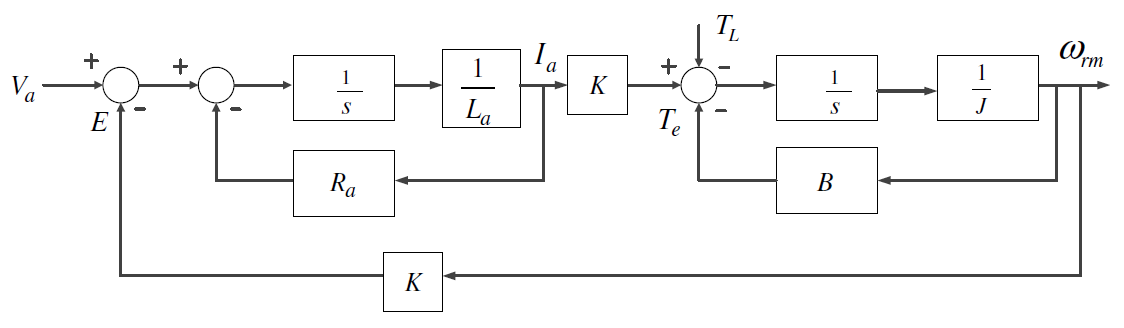
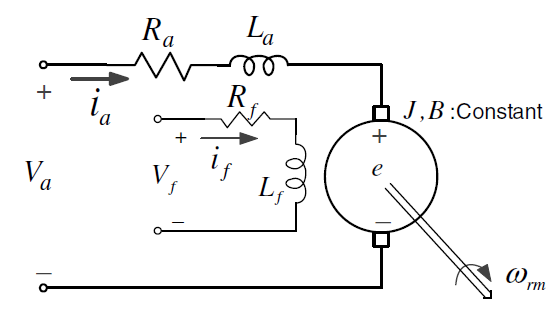
[h=2]مدار معادل کلی موتورهای DC[/h] در شکل زیر مدار معادل یک موتور DC نشان داده شده است.

 مدار معادل یک موتور DC
مدار معادل یک موتور DC
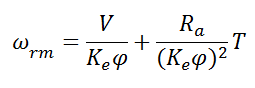
همانطور که در رابطه ی بالا هم مشاهده می کنید Ea با شار ماشین و سرعت چرخش ماشین رابطه ی مستقیم دارد.
در ادامه به بررسی انواع موتورهای DC می پردازیم و مدار معادل دقیق آنها را رسم می کنیم.
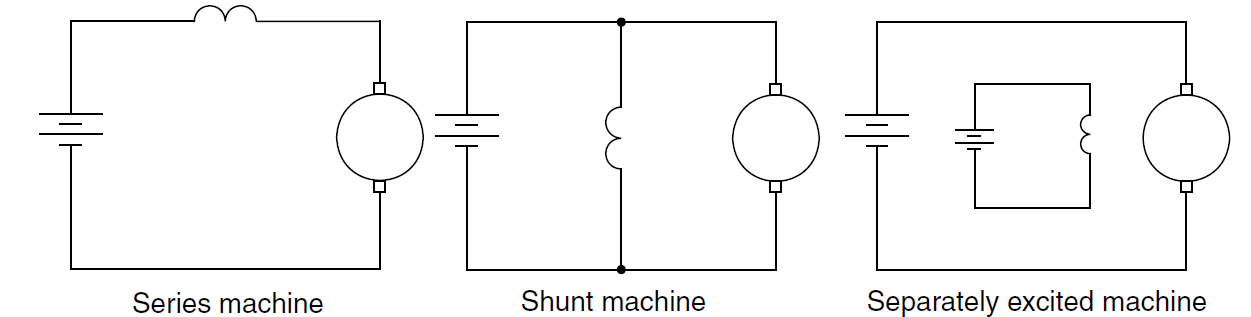
[h=2]انواع موتورهای DC[/h] موتورهای DC را به نوع می توان طبقه بندی کرد:
در ادامه به بررسی هر یک از این انواع می پردازیم
[h=2]مدار معادل[/h] در این قسمت قصد داریم مدار معادل هر 5 نوع موتور DC را نمایش دهیم که در ادامه آورده شده است.
مدار معادل موتور DC تحریک مستقل مانند مدار معادل کلی و ساده شده ی موتورهای DC است. که به صورت زیر است:
مدار معادل موتور تحریک مستقل
و همچنین مدار معادل موتور DC شنت و رواط آن به صورت زیر است:
 مدار معادل موتور شنت (موازی)
مدار معادل موتور شنت (موازی)
مدار معادل یک موتور DC سری را نیز در شکل زیر می بینید:
 مدار معادل موتور سری (IA = Is = IL)
مدار معادل موتور سری (IA = Is = IL)
موتور DC کمپوند تلفیقی از موتور سری و شنت می باشد که در زیر مدار معادل موتور DC کمپوند شنت بلند و شنت کوتاه را می بینید:
 مدار معادل موتور کمپوند شنت بلند و شنت کوتاه
مدار معادل موتور کمپوند شنت بلند و شنت کوتاه
[h=2]روش های راه اندازی موتورهای DC[/h] درواقع هدف ما کاهش جریان راه اندازی است که از دو روش زیر میسر می شود.
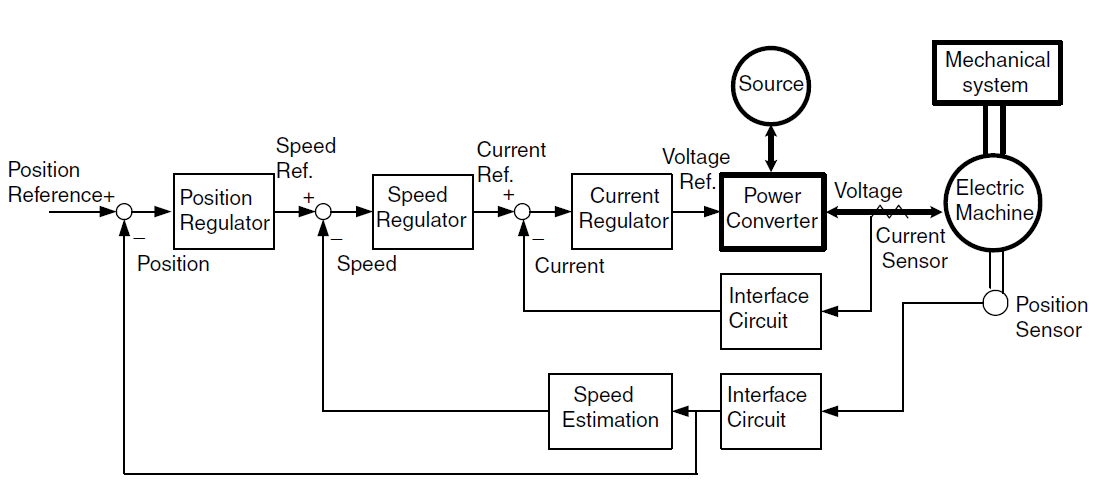
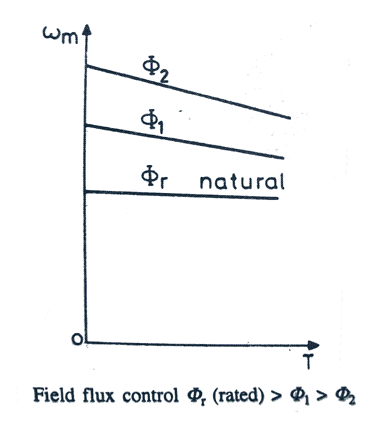
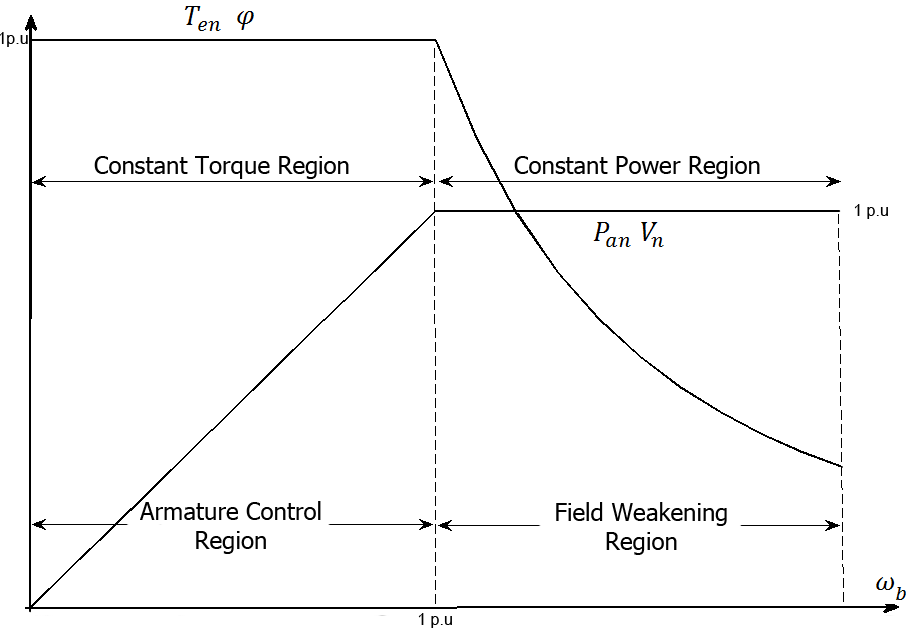
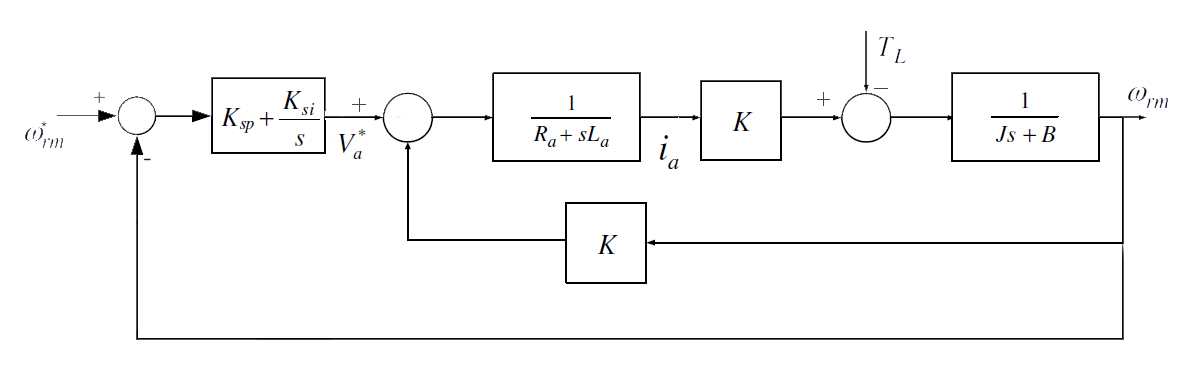
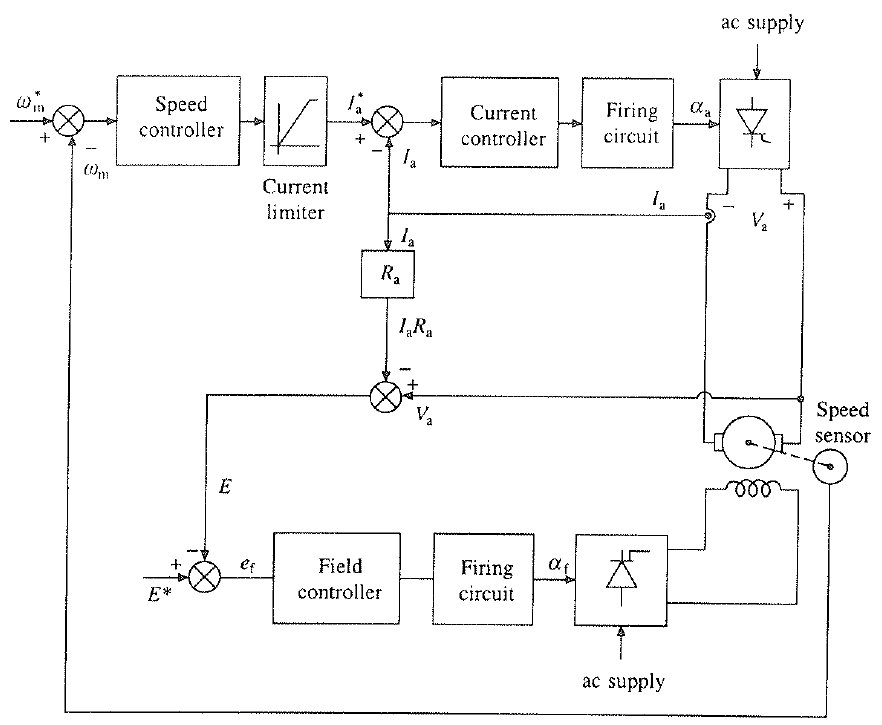
[h=2]کنترل سرعت[/h] همانطور که در مقدمه نیز توضیح داده شد موتورهای DC دارای کنترل سرعت خوبی هستند و می توان سرعت آنها را در زیر یا بالای سرعت مبنا کنترل کرد. همچنین سیستم های کنترل سرعت موتورهای DC ارزان تر از سیستم های کنترل سرعت موتورهای AC است. اولین سیستم کنترل سرعت موتورهای DC به سیستم کنترل واردلئونارد معروف است اما امروزه به جای این سیستم از مبدل های الکترونیکی که از عناصر نیمه هادی تشکیل شده اند استفاده می شود.

یک موتور DC و اجزای آن
موتورهای DC مشابه ژنراتورهای DC هستند با این تفاوت که جهت توان و درنتیجه جهت جریان آرمیچر در آن عوض شده است. درنتیجه یک ماشین هم می تواند به صورت موتور و هم به صورت ژنراتور به کار رود. اینکه واقعا به کدام صورت کار می کند تنها به جهت عبور توان در آن بستگی دارد.
ماشین DC وقتی که به عنوان مولد کار می کند ، توسط یک ماشین مکانیکی می چرخد و ولتاژی ایجاد می کند که باعث ایجاد جریان در یک مدار الکتریکی می گردد. حال وقتی که به عنوان موتور کار می کند ، توسط یک منبع ولتاژ تغذیه می شود که باعث ایجاد گردش مکانیکی می گردد.
به رغم اینکه سالیان سال است که از سیستم های قدرت AC استفاده می شود و دیگر سیستم های DC جایگاهی ندارند ، هنوز هم موتورهای DC رایج هستند. با این وجود سوال این است که چرا موتورهای DC اینقدر رایج اند ، حال آنکه سیستم های قدرت DC بسیار نادرند؟
رواج موتورهای DC چند علت دارد. یکی اینکه هنوز هم سیستم های توان DC در اتومبیل ها، کامیون ها و هواپیماها به کار می رود. مادامی که این وسایل با منبع توان DC کاربرد دارند بدیهی است که باید از موتور DC استفاده کرد. دلیل دیگر رواج موتورهای DC این است که محدوده ی تغییرات سرعت آن وسیع بوده و لذا کنترل دور خوبی دارد.
[h=2]مدار معادل کلی موتورهای DC[/h] در شکل زیر مدار معادل یک موتور DC نشان داده شده است.

 مدار معادل یک موتور DC
مدار معادل یک موتور DCهمانطور که در رابطه ی بالا هم مشاهده می کنید Ea با شار ماشین و سرعت چرخش ماشین رابطه ی مستقیم دارد.
در ادامه به بررسی انواع موتورهای DC می پردازیم و مدار معادل دقیق آنها را رسم می کنیم.
[h=2]انواع موتورهای DC[/h] موتورهای DC را به نوع می توان طبقه بندی کرد:
- موتور DC تحریک مستقل
- موتور DC شنت (موازی)
- موتور DC سری
- موتور DC آهنربای دائم
- موتور DC کمپوند
در ادامه به بررسی هر یک از این انواع می پردازیم
[h=2]مدار معادل[/h] در این قسمت قصد داریم مدار معادل هر 5 نوع موتور DC را نمایش دهیم که در ادامه آورده شده است.
مدار معادل موتور DC تحریک مستقل مانند مدار معادل کلی و ساده شده ی موتورهای DC است. که به صورت زیر است:
مدار معادل موتور تحریک مستقلو همچنین مدار معادل موتور DC شنت و رواط آن به صورت زیر است:
 مدار معادل موتور شنت (موازی)
مدار معادل موتور شنت (موازی)مدار معادل یک موتور DC سری را نیز در شکل زیر می بینید:
 مدار معادل موتور سری (IA = Is = IL)
مدار معادل موتور سری (IA = Is = IL)موتور DC کمپوند تلفیقی از موتور سری و شنت می باشد که در زیر مدار معادل موتور DC کمپوند شنت بلند و شنت کوتاه را می بینید:
 مدار معادل موتور کمپوند شنت بلند و شنت کوتاه
مدار معادل موتور کمپوند شنت بلند و شنت کوتاه[h=2]روش های راه اندازی موتورهای DC[/h] درواقع هدف ما کاهش جریان راه اندازی است که از دو روش زیر میسر می شود.
- افزایش تدریجی Vt :
- راه اندازی به کمک مقاومت راه انداز :
[h=2]کنترل سرعت[/h] همانطور که در مقدمه نیز توضیح داده شد موتورهای DC دارای کنترل سرعت خوبی هستند و می توان سرعت آنها را در زیر یا بالای سرعت مبنا کنترل کرد. همچنین سیستم های کنترل سرعت موتورهای DC ارزان تر از سیستم های کنترل سرعت موتورهای AC است. اولین سیستم کنترل سرعت موتورهای DC به سیستم کنترل واردلئونارد معروف است اما امروزه به جای این سیستم از مبدل های الکترونیکی که از عناصر نیمه هادی تشکیل شده اند استفاده می شود.